פרסומת
מכוניות בשליטה מרחוק הן מהנות, בטוח, אבל נהיגה עצמית מכוניות רובוטיות מהנות עוד יותר. במדריך זה נבנה רובוט ארבע גלגלים שיכול לנוע סביב ולהימנע ממכשולים. רכשתי ערכת 4WD שלמה זו מבית AliExpress, אבל אתה יכול בקלות לקנות את רוב הרכיבים האלה מחנות אלקטרוניקה ולהרכיב אותם בעצמך.
אני ממליץ לקרוא את כל ההוראות לפני שתתחיל, מכיוון שזה יבהיר כמה דברים שעשויים להיות מבלבלים בפעם הראשונה. כמו כן, זה עשוי להיראות כמו פרויקט מתקדם וארוך מאוד בגלל אורך ההוראות, אך הוא למעשה די פשוט. אין צורך להפחיד - זהו פרויקט ברמה מתחילה שתוכלו להשיג תוצאות מספקות איתו, ואז לבנות עליו ככל שתלמדו יותר. לא אוהבים את הסגנון הזה של הרובוט? הנה עוד כמה רובוטים של ארדואינו 8 רובוטים של ארדואינו שתוכלו לבנות בפחות מ- 125 דולרהארדואינו יכול לעשות המון, אבל האם ידעת שהוא יכול ליצור רובוטים מן המניין? גם בזול למדי! קרא עוד אתה יכול בקלות לבנות במקום זאת.
הנה מה שיש לנו, אחרי שהוצאנו הכל מהאריזה:

כדי להתחיל, נחבר את המנועים ואת גשר ה- H (הכרטיס המספק כוח למנוע) לחלק התחתון של השלדה. ראשית, חבר את ארבע תושבות המתכת (הן מלבני מתכת קדוחות) לכל מנוע באמצעות שני ברגים ארוכים ושני אגוזים.

תצטרך לוודא שהם מחוברים כראוי, אז בדוק את התמונה למטה כדי לוודא שצד הגוש עם שני חורים קדוחים יפנה כלפי מטה. שימו לב כי החוטים בכל מנוע מכוונים לכיוון מרכז השלדה.

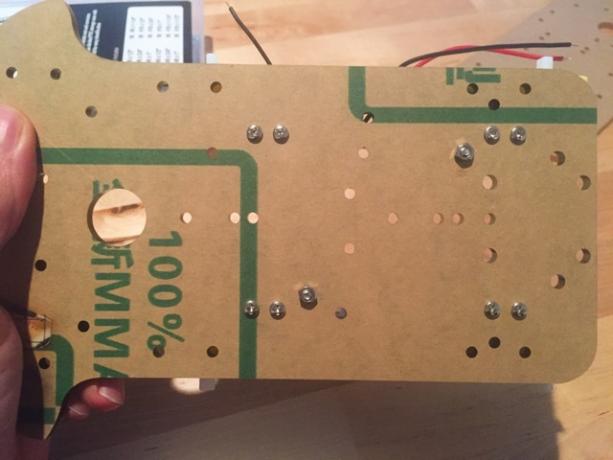
כעת ניתן לחבר כל מנוע לשלדה באמצעות שני ברגים קצרים בתחתית כל סוגר מתכת. הנה תצוגה של החלק התחתון של המארז כך שתוכל לראות איפה הברגים צריכים להיות:

השלב הבא הוא לאבטח את גשר ה- H (זה הלוח האדום בערכה שלי) לשלדה. אולי תרצה לחכות עד שכל החוטים יהיו מחוברים לגשר ה- H לפני שתבצע זאת, אבל זה תלוי בך (מצאתי שזה יהיה קל יותר). הערה מהירה: בערכה שלי היו חסרים מספר מחברים, אז השתמשתי בסרט חשמלי כדי לאבטח את הגשר. עם זאת, תוכלו לראות כאן לאן הברגים והאגוזים היו הולכים:
כעת, לאחר שגשר H הוצמד, תוכלו להתחיל לחבר את ספק הכוח. מכיוון שמחזיק הסוללה בעל שש-AA מגיע עם מתאם DC, תצטרך לנתק את הקצה (מה שעשיתי) או להעביר חוטי מגשר לסוללות עצמן.

לא משנה איך תחליט לעשות זאת, תעביר את החוט החיובי ליציאה שכותרתה "VMS" ואת החוט השלילי לזה שנקרא "GND" על הגשר. הברג את המהדקים וודא שהם בטוחים. לאחר מכן, תחבר את חוטי המנוע. משני הצדדים יש קבוצה של שני יציאות; האחד מכונה "MOTORA" והשני "MOTORB". שניהם חוטים אדומים מכל צד ייכנסו לנמל הירוק ביותר ושני החוטים השחורים ייכנסו החיצוני ביותר. תמונה זו צריכה להבהיר יותר:
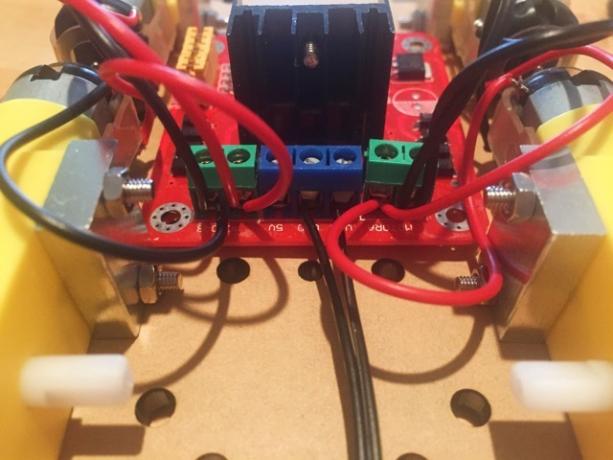
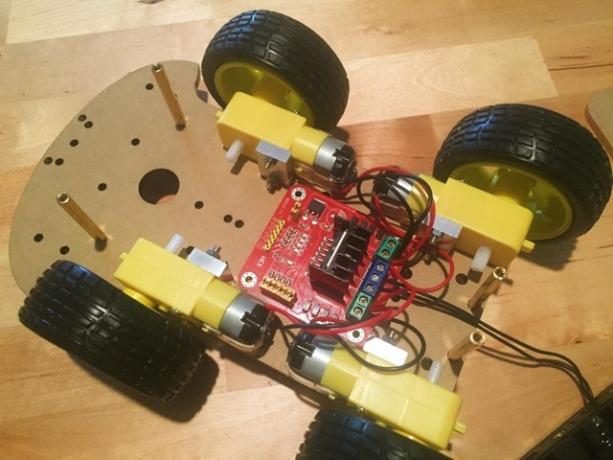
גיליתי שעלי להפשיט חלק מהדיור מחוטי המנוע כדי שזה יעבוד. כעת, כאשר יש לכם את המנועים ואספקת החשמל כולם מחוברים, החלקו את הגלגלים אל פירי ההינע של המנוע, ו חבר את ארבעת פירי הנחושת במקומות המוצגים בתמונה למטה (כל פיר נחושת זקוק לבורג קטן אחד). הרובוט הזה מתחיל לקרום עור וגידים!
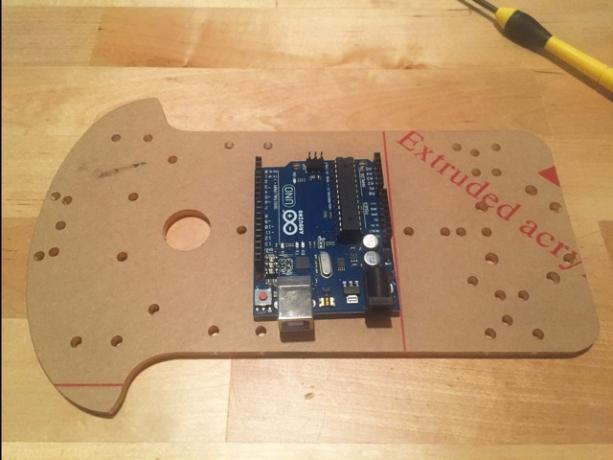
כעת, הניחו את החלק הזה של המארז הצידה ותפסו את החלק השני שיושב למעלה. השלב הבא הוא לחבר את הארדואינו - שוב הייתי צריך להשתמש בסרט חשמלי, אבל אתה אמור להיות מסוגל לאבטח את שלך טוב יותר עם כמה ברגים ואומים.
השלב הבא מחייב את המיקרו סרוו, את הכותרת השחורה, את מחזיק הסרוו (המורכב משלושה חלקי פלסטיק שחורים), וכמה ברגים קטנים. השתמש באחד מהברגים החדים הגדולים בערכה כדי לחבר את הכותרת השחורה למיקרו סרוו:

ואז הפוך את הסרוו הפוך לטבעת הפלסטיק השחורה של המחזיק. וודאו כי החוטים היוצאים מהסרוו פונים לאותו כיוון של החלק הארוך יותר של המחזיק (שוב, ראו תמונה למטה), והשתמש בארבעה ברגים זעירים כדי להדק את המוט (ישנם ארבעה חורים במחזיק המתיישרים עם החורים על משקוף).

כך זה נראה לאחר שהוא מצורף:

לבסוף, קחו את שני החלקים האחרים של מחזיק הסרוו והקישו אותם על הסרוו (ישנם חריצים בחלקים הצדדיים התואמים את לוח הפלסטיק בסרוו).

עכשיו כשמחזיק סרוו הושלם, ניתן להרכיבו לשלדה.

לכאן הולכים הברגים:

הגיע הזמן לתת לרובוט שלנו כמה עיניים. חבר את חיישן הקולי למחזיק הסרוו באמצעות שני קשרי רוכסן.

אם אתה עובד מאותה ערכה כמוני, תקבל מגן חיישן Arduino. לא נשתמש בזה בבנייה זו, אבל אתה יכול להקפיץ אותו מעל ה- UNO עכשיו אם תרצה (כמו שיש לי בתמונה למטה). פשוט יישר את הסיכות בתחתית המגן עם יציאות הקלט / פלט בארduino ולחץ כלפי מטה כדי לחבר אותן. אתה לא צריך את זה כרגע, אבל מגנים יכולים להועיל 4 מגיני הארדואינו המובילים בכדי להעצים את הפרויקטים שלךקנית ערכת התנעה של ארדואינו, עקבת אחר כל המדריכים הבסיסיים, אבל עכשיו הצלחת לחסום את הנגף - אתה צריך עוד פיסות ובובים כדי להגשים את חלום האלקטרוניקה שלך. למזלך, אם יש לך ... קרא עוד .

בין אם אתה מחבר מגן חיישן ובין אם לא, תצטרך כעת ארבעה חוטים כדי לחבר את חיישן האולטרה סאונד לארדואינו. ישנם ארבעה סיכות בחיישן, VCC, GND, TRIG ו- ECHO. חבר VCC לפינים 5V על ארדואינו, GND ל- GND, ו- TRIG ו- ECHO לפינים קלט / פלט 12 ו -13.
עכשיו תפוס את החלק התחתון של השלדה, וחבר שישה חוטי מגשר לפינים הקלט / פלט של גשר H (הם מסומנים ENA, IN1, IN2, IN3, IN4, ENB). שימו לב אילו חוטי צבע מחוברים לאילו יציאות, כפי שתצטרכו לדעת בהמשך.

עכשיו הגיע הזמן להתחיל לחבר את הדבר הזה. תפוס את החלק העליון של השלדה והנח אותו על גבי פירי הנחושת המחוברים לחלק התחתון, ומשוך את החוטים המחוברים לגשר H דרך החור במרכז המארז. חבר את ששת החוטים ליציאות קלט / פלט באופן הבא:
- ENA ליציאת קלט / פלט 11
- ENB ליציאת קלט / פלט 10
- A1 ליציאת קלט / פלט 5
- יציאת קלט / פלט A2 6
- B1 ליציאת קלט / פלט 4
- יציאת B2 ל- I / O 3

כעת השתמש בארבעה ברגים קצרים כדי לחבר את החלק העליון של השלדה לפירים הנחושת. הצב את מחזיק הסוללה שש-AA מעל המארז (הברג אותו אם אתה יכול), חבר את מחזיק הסלולרי של 9 וולט לארדואינו, והבוט הזה מוכן להתנדנד!
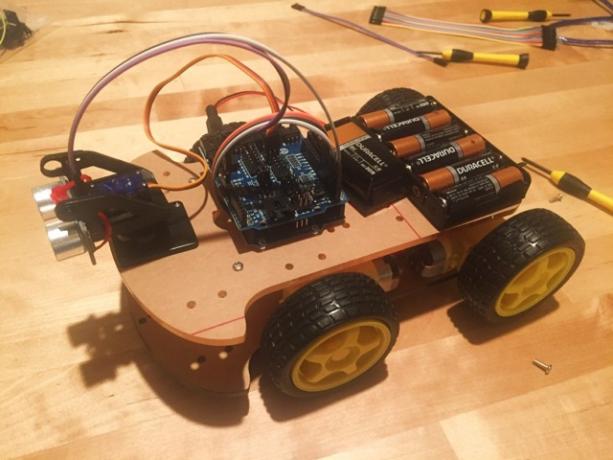
ובכן, כמעט מוכן להתנדנד. אין לה עדיין מספיק אישיות.

הנה. עכשיו לתת לזה מוח. בואו נעשה קצת תכנות.
הדבר הראשון שנבצע הוא לבדוק לוודא שהגשר והמנועים מחוברים נכון. הנה סקיצה מהירה שיגיד לבוט לנסוע קדימה במשך חצי שנייה, לנסוע אחורה למשך חצי שנייה ואז לפנות שמאלה וימינה:
זה המון קוד לבדיקה פשוטה, אך הגדרת כל הפונקציות האלו מקלה על הצביעה בהמשך. (תודה גדולה לבילווה על שלו פוסט בבלוג על השימוש בגשר H להגדרת פונקציות אלה.) אם משהו השתבש, בדוק את כל החיבורים שלך וכי החוטים מחוברים לסיכות הנכונות. אם הכל עבד, הגיע הזמן לעבור לבדיקת החיישן. כדי להשתמש בחיישן הקולי, תרצה הורד את ספריית NewPingואז השתמש סקיצה> כלול ספרייה> הוסף ספריית ZIP ... לטעון את הספרייה.

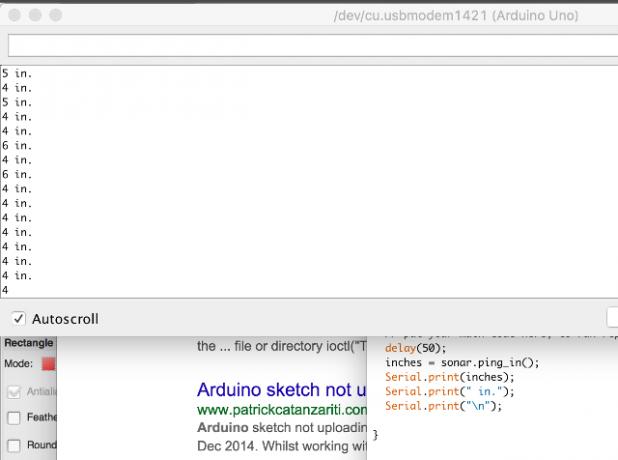
וודא שאתה רואה את הצהרת הכלול בראש הסקיצה; אם לא, מכה סקיצה> כלול ספרייה> NewPing. לאחר שתעשה זאת, טען את הסקיצה הבאה:
העלה את הסקיצה ופתח את המסך הסידורי באמצעות כלים> מוניטור סידורי. אתה אמור לראות רצף מספרים שמתעדכן במהירות. החזק את היד שלך מול החיישן ובדוק אם המספר הזה משתנה. הזיזו את היד פנימה והחוצה, ועליכם למדוד כמה רחוק היד שלכם נמצאת מהחיישן.
אם הכל עבד נכון, הגיע הזמן לחבר את הכל ולתת לדבר הזה לרוץ! הנה הקוד לרובוט עכשיו. כפי שאתה בטח יכול לדעת, אלה בעצם שני מערכוני הבדיקה שהוכנסו יחד עם אמירה שנוספה אם לשלוט בהתנהגות הרובוט. נתנו לזה התנהגות פשוטה מאוד של הימנעות ממכשולים: אם היא מגלה מרחק של פחות מארבעה סנטימטרים, היא תגבה, תפנה שמאלה ותתחיל לזוז שוב. הנה סרטון של הבוט בפעולה.
תן לרובוט שלך קצת חיים
לאחר שתקבל התנהגות זו כראוי, תוכל להוסיף התנהגות מורכבת יותר; לגרום לרובוט להתחלף בין פנייה שמאלה לימין, או לבחור באופן אקראי; נשמע זמזם אם הוא מתקרב למשהו; פשוט תפנה, במקום לגבות; אתה באמת מוגבל רק על ידי הדמיון שלך. אתה יכול להשתמש כמעט בכל דבר שלך ערכת המתנע של ארדואינו מה יש בערכת Starter Arduino שלך? [מתחילים בארדואינו]מול תיבה מלאה רכיבים אלקטרוניים, קל להיות מוצף. להלן מדריך בדיוק למה שתמצא בערכה שלך. קרא עוד להוסיף פונקציונליות נוספת. תבחין גם שעדיין לא קידמנו שום דבר עבור הסרוו: אתה למעשה יכול לגרום ל"עיניים "של הרובוט שלך לנוע קדימה ואחורה. אולי להשתמש בהם כדי לחפש נתיב במקום רק לגבות בכל פעם שהוא מוצא מכשול ישירות מולו.
יידע אותנו אם החלטתם לבנות רובוט זה או אחר, וספרו לנו כיצד אתם מחליטים להתאים אישית את התנהגותו או את מראהו. אם יש לך שאלות לגבי הרובוט הזה, פרסם אותם בתגובות למטה, ואני אראה אם אוכל לעזור!
דן הוא אסטרטגיית תוכן ויועץ שיווקי המסייע לחברות לייצר ביקוש ומובילים. הוא גם מבלוג על אסטרטגיה ושיווק תוכן ב- dannalbright.com.

